



Seit circa zwei Jahren mischt Google medial massiv im Business der selbstfahrenden Autos mit. Man hat praktisch den Eindruck, als ob es nur noch eine Frage des äußeren Erscheinungsbildes ist, welches Fahrzeug Google nun als Taxiersatz auf die Straßen dieser Welt los lässt.
Ersatz für den privaten PKW, für das Taxigewerbe sowieso und auch Waren- und Dienstleistungen werden alsbald durch die Self Driving Cars ersetzt, so die mediale Darstellung. Journalisten und Blogger geben jedes noch so schön aussehende Foto von selbstfahrenden Autos zum besten und wiederholen Aussagen über die dinosaurierartige Entwicklungsgeschwindigkeit der deutschen Automobilhersteller.
Ich möchte mit diesem Beitrag eine kleine Einschätzung zu der aktuellen und zukünftigen Situation der selbst fahrenden Autos machen.
Definition des selbstfahrenden Autos
Ein Hauptproblem in der aktuellen medialen Debatte ist sicherlich das pure Durcheinanderwerfen der Begrifflichkeiten. Ab wann fährt denn ein Auto ‘selbst’?
- Assistiertes Fahren: Der Fahrer übernimmt dauerhaft Lenken oder Gas/Bremse , das Auto die jeweils andere Funktion, welche der Fahrer aber überwachen muss
- Teilautomatisiertes Fahren: Der Fahrer muss das Auto dauerhaft überwachen, das Auto übernimmt aber Lenken & Gas/Bremse in einem spezifischen Anwendungsfall, z.B. auf der Autobahn ohne Baustelle oder Sondersituationen.
- Hochautomatisiertes Fahren: Der Fahrer muss das Auto nicht mehr dauerhaft überwachen, muss aber im Notfall übernehmen können. Das Auto übernimmt aber Lenken & Gas/Bremse in einem spezifischen Anwendungsfall, z.B. auf der Autobahn ohne Baustelle oder Sondersituationen, es erkennt Systemgrenzen selbstständig und fordert den Fahrer zur Übernahme auf.
- Vollautomatisiertes Fahren: Kein Fahrer erforderlich im speziellen Anwendungsfall, z.B. auf der Autobahn ohne Baustelle oder Sondersituationen, da das System diese definierten Szenarien selbst lösen kann
- Fahrerlose Fahrt: Von Start bis zum Ziel die vollständig selbstständige Fahrt bei allen Straßentypen und Sondersituationen.
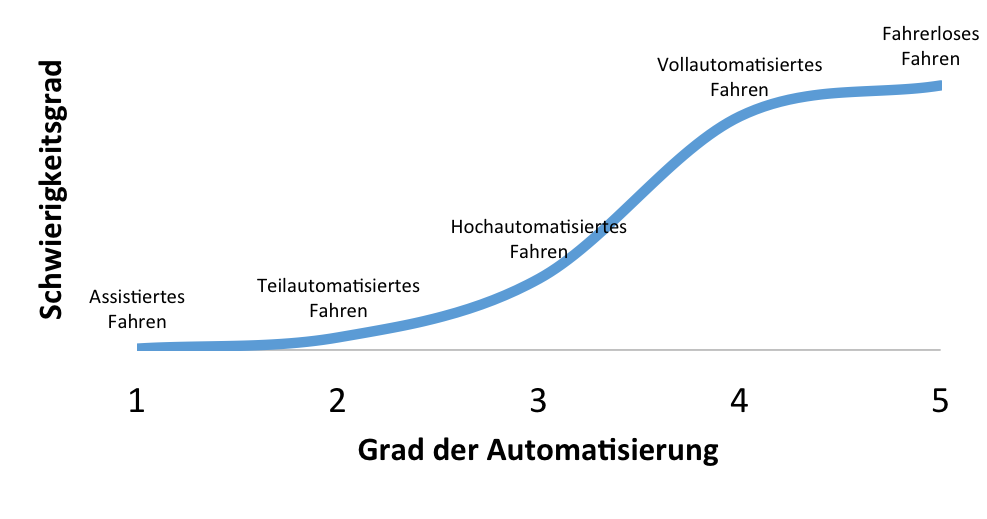
Schematische Darstellung des Schwierigkeitsgrades nach Automatisierungsgrad
Die Vision, die oftmals transportiert wird, ist sicherlich die Stufe 5, in welcher das Google Auto der Pulsschlag der Großstadt ist und jedermann vor der Haustür abgeholt und am Arbeitsort abgesetzt wird. “Kein Bedarf mehr an einem Privat-PKW!”, so der Tenor.
Aktueller Stand der Technik
Genau genommen fahren Autos schon seit den 1980er Jahren vollautonom (siehe Projekt Prometheus), d.h. ohne das ein Mensch eingreifen muss. Dies allerdings nur in definierten Szenarien.
Die Welt ist allerdings nicht so einfach, wie man sie gern hätte. Chris Urmson hat dazu einen schönen TED Talk gegeben, in dem er zeigt, welche Dinge im Alltag auf so ein Computersystem zukommen.
So lange man auf Autobahnen unterwegs ist, d.h. alle Fahrzeuge in die gleiche Richtung fahren, es keine engen Kurven gibt, keine Radfahrer oder Fußgänger, kein kreuzender Verkehr, und vieles mehr nicht, mag die Situation gewissen Gesetzmäßigkeiten folgen, die man relativ gut in Algorithmen festhalten kann.
- halte Abstand zum Vordermann größer als Sicherheitsabstand
- fahre in der Mitte der Spur, welche durch 2 Linien gekennzeichnet ist
- fahre Geschwindigkeit gemäß Verkehrszeichen, sonst Richtgeschwindigkeit
- wechsle nicht die Spur, wenn dort ein Fahrzeug ist oder sich mit hoher Geschwindigkeit von hinten eines nähert
- …
Diese Funktionen finden dieser Tage ihren Weg in Serienfahrzeuge der Oberklasse. Auf Autobahnen können Fahrzeuge aktuellen Baujahres gemäß Stufe 3 hochautomatisiert fahren. Die begrenzenden Szenarien bleiben allerdings. Eine Missachtung dieser Anwendungsfälle führt zum Ausfall des Systems, d.h. der Fahrer muss jederzeit die Situation übernehmen können.
Bleibt die Frage, wann Stufe 4 und 5 erreicht wird?
Im erst kürzlich veröffentlichten Bericht “Google Self-Driving Car Testing Report on Disengagements of Autonomous Mode December 2015” kann man ein paar Zahlen zu Ausfällen der aktuellen Google Testflotte nachlesen. Auch hier wird deutlich, dass die autobahnähnlichen Szenarien nicht das größte Problem sind. Nimmt man die Fahrfehler auf Interstate+Freeway+Highway zusammen (37), so waren diese trotzdem nur knapp 1/10 der Ausfälle im innerstädtischen Verkehr (304 zwischen Sep. 2014 und Nov. 2015) gewesen. Google sagt allerdings, dass hauptsächlich in städtischen Szenarien gefahren wurde, eben weil dies noch zu verbessern ist.
Komplexität und Schwierigkeit
Ein Computer, auch wenn er neuerdings mit ‘Artificial Intelligence’ ausgestattet wird, ist nicht sehr schlau. Er kann bestimmte Situationen extrem gut und wesentlich besser als der Mensch meistern (Abstand zum Vordermann konstant halten), andere wiederum überhaupt nicht. Nehme man als Parameter für die Komplexität des Straßenverkehrs nur folgende 5, so versteht man schon, wo das Problem liegt:
| Parameter | Autobahn | Stadt |
| Fahrspur | breit, geradeaus | eng und nicht exclusiv |
| Fahrtrichtung | alle gleich | von und in alle Richtungen |
| Verkehrszeichen | wenige an definierten Stellen | Ampeln, Vorfahrt, … an undefinierten Stellen |
| Verkehrsteilnehmer | nur Kraftfahrzeuge | Kraftfahrzeuge, Fußgänger, Radfahrer, Gruppen, Tiere, Bierbikes, Rollstühle, … |
| Sicht | weit | eingeschränkt/verdeckt |
Noch nicht mitbedacht sind alltägliche Situationen, wie Blickkontakt an Fußgängerüberwegen oder Fahranfänger, die einen ‘durch winken’ oder Autos, die ohne Blinken unlogische Manöver fahren. Normaler Großstadt-Berufsverkehr, wie ihn jeder, jeden Tag meistert.
Die Fehlerquote würde exponentiell nach oben schnellen, wenn man die auf Autobahn funktionierenden Systeme im innerstädtischen Berufsverkehr fahren lässt.
Fehlerquote und 100% Sicherheit
Chris Urmson spricht das Thema in seinem TED Talk an: Einfach bestehende Technik zu nehmen und etwas an den Algorithmen zu optimieren wird schwerlich die nächste Stufe im Automatisierungsgrad erreichen.
Beispiel Spurerkennung
Ein kleines Beispiel: Eine Spurverlassenswarnung, d.h. ein System was die Fahrspur erkennt und gegenlenkt, sobald man diese verlässt, verhindert vielleicht alle 100.000km einen Unfall. Fällt sie in dem Moment aus, hat sie eine Fehlerrate von 1/100.000km. Man sagt auch: 10 DPMO (Defects per Million Opportunities). Dies entspricht einem korrekten Verhalten in 99,999% der Fälle! Eigentlich ziemlich überzeugend, oder?
Menschen sind aber sehr schlecht, wenn es um die Einschätzung von Wahrscheinlichkeiten oder statistischen Risiken geht. Beispiel: Geburtstagsparadoxon!
Möchte man dieses Spurerkennungssystem mit 10 DPMO nun nutzen, um damit vollautonom zu fahren, wird es kritisch. Bei autonomer Fahrt muss es vielleicht 1000x pro Kilometer die Fahrspur korrekt erkennen und das Auto lenken. Hat man hier 10 defects per million opportunities, würde es durchschnittlich alle 100km versagen. Bei Autobahntempo also circa jede Stunde.
Die Fehlerrate muss demzufolge runter! Massiv runter! Die Grafik sieht eigentlich ganz simpel aus:

DPMO vs. Fehlerfreiheit: 100% Fehlerfrei bedeutet 0 Unfälle pro 1mio Kilometer
Nun wird hoffentlich jedem klar sein, dass es keine 100% fehlerfreien Systeme gibt. Schaut man in den von Google veröffentlichten Bericht “Google Self-Driving Car Testing Report on Disengagements of Autonomous Mode December 2015“, so findet man Angaben zu Fehlerquoten.
Google Self-Driving Car Fehlerquoten
Im Berichtszeitraum (September 2014 bis November 2015, also 14 Monate) wurden 683.000km von der Testflotte zurück gelegt. Dabei hat das Fahrzeug 272x aus verschiedenen Gründen die sofortige Übernahme vom Fahrer angefordert und 69x musste der Fahrer eingreifen. Die Fehler verteilten sich vor allem auf Erkennungsschwächen, Softwarefehler und auch Hardwarefehler, wie in nachfolgender Abbildung zu sehen ist.
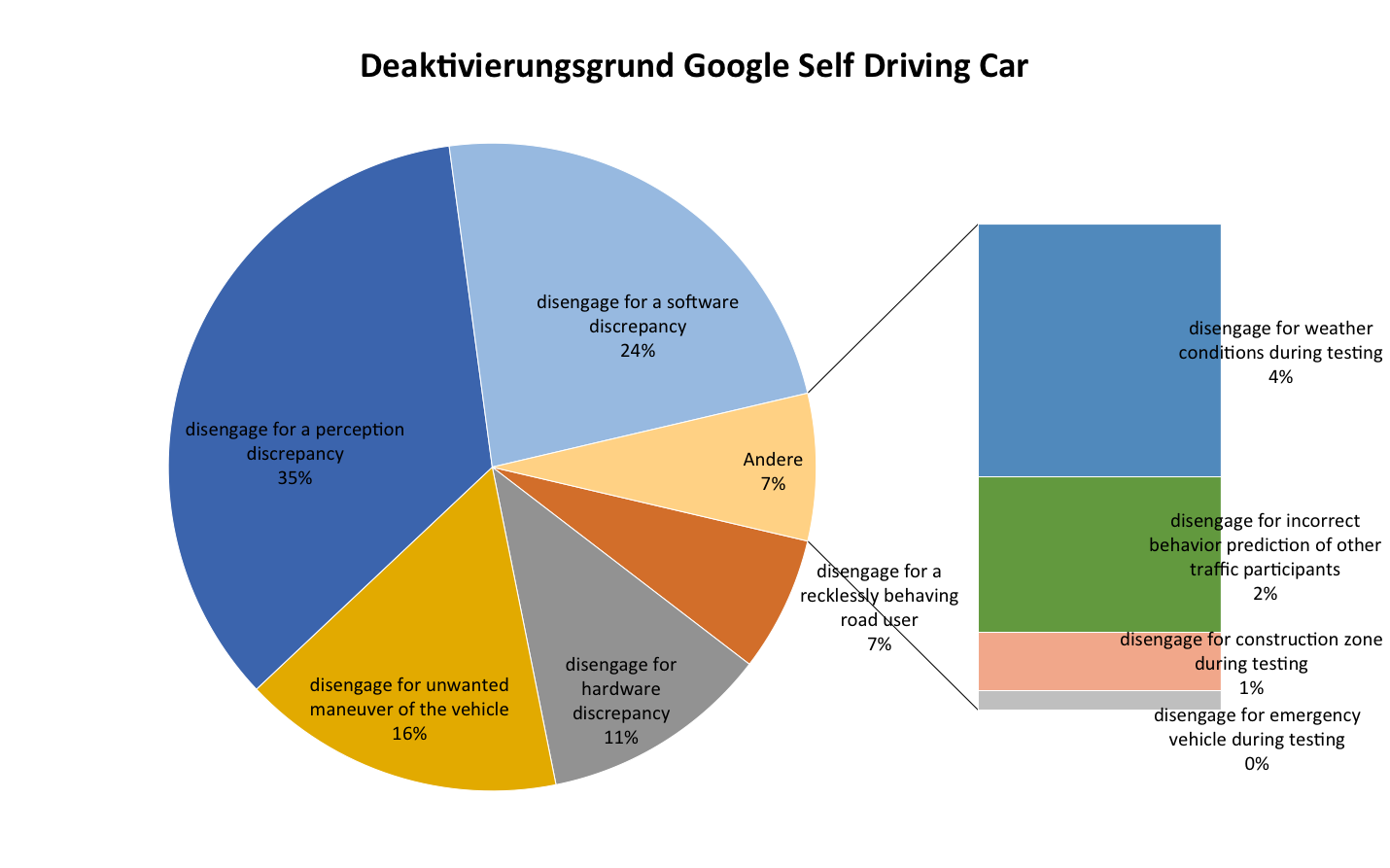
Deaktivierungsgründe der Google Self Driving Car Flotte im Beobachtungszeitraum
Das macht eine Fehlerquote von 499 DPMO, d.h. das Google-Self-Driving Car konnte 99,95% der Situationen lösen.
Der zeitliche Verlauf mit durchaus positiver Tendenz ist:

Datenquelle: Google Self-Driving Car Testing Report on Disengagements of Autonomous Mode December 2015, Eigene Darstellung
Bleibt die Frage: Wie gut ist der Mensch?
Menschen und Verkehrsunfälle
Status Quo ist, dass der Mensch die Fahrzeuge steuert. Dabei wurden in Deutschland 735mrd. Kilometer zurück gelegt, wobei 2,4mio. Unfälle polizeilich registriert wurden [Quelle: ADAC Zahlen, Fakten, Wissen]. Das sind 3,27 Unfälle pro Millionen Kilometer.
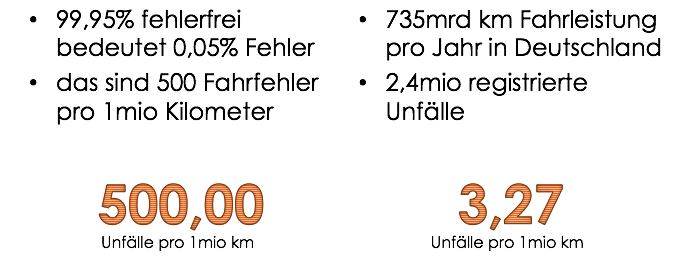
Vergleich von 99,95% Fehlerfreiheit mit aktueller Unfallquote von menschlichen Fahrern in Deutschland
3,27 Unfälle pro 1mio km entspricht einer Fehlerfreiheit von 99,999673%.
In einer aktuellen Studie der Universität Michigan [Schoettle & Sivak: A Preliminary Analysis of Real-World Crashes Involving Self-Driving Vehicles, University of Michigan] wurde die Unfallhäufigkeit von konventionellen und selbst fahrenden Fahrzeugen verglichen. Dabei kommen normal gesteuerte Fahrzeuge in den USA auf 4,1 Crashes per million miles (2,5 Unfälle pro Millionen-km). Die selbst fahrenden Fahrzeuge (Google inklusive) erreichen eine Quote von 9,1 (5,7 Unfälle pro Millionen-km).
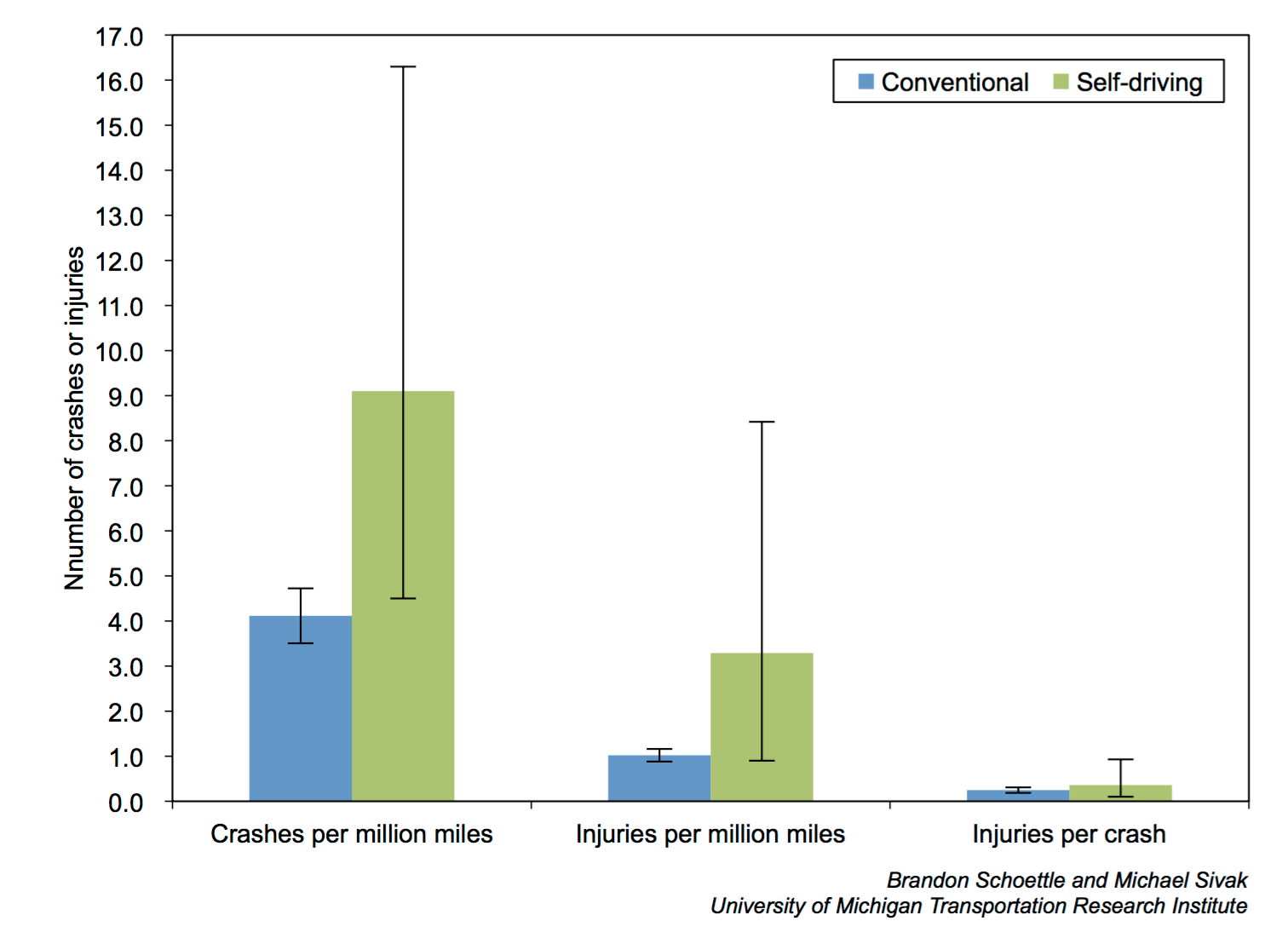
Unfälle pro millionen Meilen von konventionell gefahrenen Fahrzeugen und selbstfahrenden Fahrzeugen in den USA. Quelle: Schoettle & Sivak: A Preliminary Analysis of Real-World Crashes Involving Self-Driving Vehicles, University of Michigan
Es wird ausdrücklich darauf hingewiesen, dass die zurückgelegten Kilometer der selbst fahrenden Flotten noch so gering ist, dass das Konfidenzintervall für diese Aussage sehr groß ist. Außerdem waren die Fahrzeuge nicht im Winter oder bei Nebel unterwegs und auch hauptsächlich auf exakt 3D-vermessenen Straßen.
Im Google Bericht “Google Self-Driving Car Testing Report on Disengagements of Autonomous Mode December 2015” findet man die Information, dass nachträgliches Playback von kritischen Situationen in denen ein Fahrer eingreifen musste, ergeben haben, dass es in 10 Fällen zu Kollisionen mit anderen Objekten gekommen wäre, wovon 2 nur mit kleinen Objekten gewesen wären. Rechnet man mit 8 ernsthaften Kollisionen auf 683.000km, so ergibt sich eine Fehlerfreiheit für 99,9988% der Kilometer (DPMO=12).
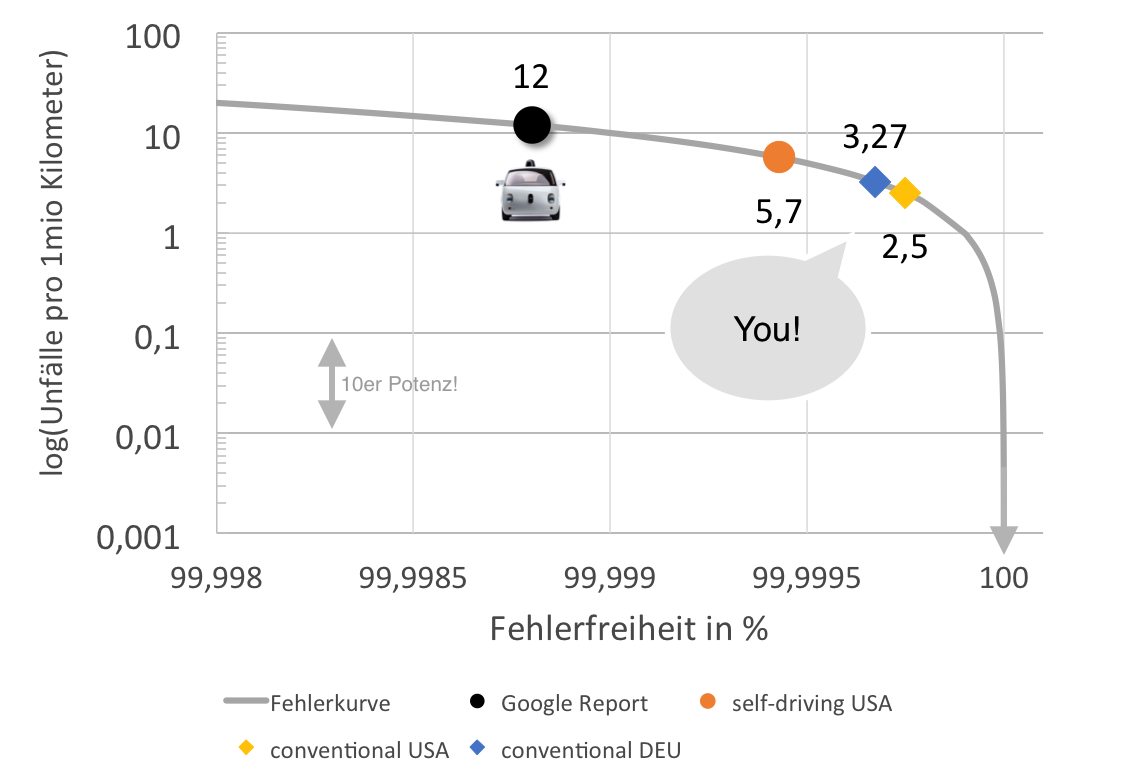
Logarithmische Darstellung von Defects per Million Opportunities als Funktion der Fehlerfreiheit in % mit aktuellem menschlichem Niveau, Google Niveau und Richtung der Entwicklung
Die Self-Driving-Cars (auch nicht die von Google) spielen noch lange nicht in der Liga der menschlichen Fahrer_innen mit. Nur durch die Anwesenheit eines Google-Testfahrers wurden Unfälle verhindert. Ohne diese, wäre es, als ob man sich bei einem betrunkenen Fahrer in’s Auto setzt.
Das Fahren und selbstständige Agieren ist ein extrem komplexes Zusammenspiel von Sensoren, Datenübertragung- und Verarbeitung, Algorithmen und Aktoren. Überall lauern im Detail Fehlermöglichkeiten, die das Gesamtsystem ausfallen lassen können.
Step-by-Step zu Fail Operational Systemen
Die Fehlermöglichkeiten-Einfluss-Analyse liefert für hochautomatisierte Fahrt erhebliche Risiken, sodass ein Qualitätsniveau von Sensoren und Steuergeräten und Aktoren erreicht werden muss, welcher den Six-Sigma BlackBelts in den Qualitätsabteilungen schlaflose Nächte bereitet. Die ISO 26262 fordert für Sensoren und Systeme Ausfallraten, die je nach Automotive Safety Integrity Level entsprechend kompliziert zu erreichen sind.
Für die letzte Stufe der autonomen Fahrt, muss die gesamte Architektur so ausgelegt sein, dass sie als so genannte fail operational Systeme (Weiterbetrieb trotz Fehler) funktionieren und nicht, wie bei den meisten heutigen Systemen, ‘nur’ fail safe (es wird ein sicherer Zustand eingenommen, meist Abschalten des Systems). Es wird also auf Systeme, die denen von Flugzeugen ähnlich sind, hinaus laufen.
Blick in die Zukunft
“Prognosen sind äußerst schwierig, vor allem wenn sie die Zukunft betreffen”
Es gibt durchaus Ingenieure aus dem Fachgebiet, welche eine Stufe 5 für überhaupt nicht realisierbar halten. Zumindest nicht so, dass die Gesellschaft die damit einhergehende Fehlerquoten akzeptiert. Die Diskussion um die Ethik der selbstfahrenden Autos ist seit einiger Zeit in vollem Gange. Damit gemeint ist allerdings die einfache Frage, wie wir Menschen reagieren, wenn ein selbst fahrendes Fahrzeug ein Menschenleben auslöscht. Natürlich passiert es jeden Tag von Menschen verschuldet, aber was, wenn die Maschine ‘schuld’ ist? Können wir darüber hinweg sehen, weil es ja gesamtgesellschaftlich (statistisch) sicherer geworden ist oder verteufeln wir jedes Fahrzeug? Ähnliche Diskussionen gibt es ja auch zum Thema Impfen vs. Impfgegner. Die Faktenlage ist eigentlich eindeutig, trotzdem gibt es reichlich Diskussion.
Technik & Recht & Gesellschaft
Die Daimler und Benz Stiftung hat in ihrer “Villa Ladenburg”-Studie genau diese Rahmenbedingungen aufgegriffen. Sehr empfehlenswerte Lektüre unter OpenAccess: “Autonomes Fahren – Technische, rechtliche und gesellschaftliche Aspekte“, außerdem dazu der Forschergeist Podcast FG003 “Autonomer Verkehr”.
Wie reagieren die anderen, (noch) vom Menschen gelenkten Fahrzeuge auf völlig emotionslos fahrende Vehikel? Es hat sich gezeigt, dass beispielsweise ein Überschreiten der zulässigen Höchstgeschwindigkeit mit implementiert werden muss, da es sonst zu kritischen Überholmanövern von anderen Fahrzeugen kommt, was insgesamt wieder zu einer erhöhten Unfallwahrscheinlichkeit führte.
Viele Fragen, welche in den nächsten Jahren auf uns zukommen. Ich bin froh, in diesem Zeitalter Fahrzeugtechnik-Ingenieur zu sein, welcher in diesem interessanten Kapitel ‘Auto’ mitarbeiten darf.
Vielen Dank an André Kaeding (Berater funktionale Sicherheit), welcher mir bei der Erstellung dieses Beitrags geholfen hat.
Titelbild: CC-BY-NC2.0 Lizenz von flickr.com Brook Ward – “Self Portrait“



4 Comments
Barcamp: Autos und Verkehr der Zukunft
Hallo,
ich halte es für wichtig, dass sich die Akteure der Zukunftsmobilität vernetzen und daher will ich dieses barcamp veranstalten. Ob es ums Elektroauto, elektrische Nutzfahrzeuge oder das autonome Auto geht, auf diesem barcamp können Sie neue Akteure und neue Ideen kennen lernen.
Nutzen Sie die Möglichkeit und gestalten Sie dieses barcamp mit, gerne können Sie auch Sponsor werden!
http://elektroautovergleich.org/barcamp-autos-der-zukunft-de-stimmen-sie-an-und-werden-sie-sponsor/
Viele Grüße
Jürgen Vagt
intractive Led flat panel
Interactive LEDs give you full mouse control of your PC or MAC from the large LED touch screen.
Control any application that is running on your computer and use our software to annotate, collaborate cast and more.
Onboard Android gives you access to 100s of Apps to install onto the LED from the TouchIT App Store.
The LED comes with 10pt Multi-Touch,” 3 Year On Site Warranty (USA & Canada) & a 50 000 hour lifespan~~!
https://www.gladwingroup.com/interactive-led-flat-panel-display-supreme-9-series.php