Nachdem ich heute den ganzen Vormittag damit verbracht habe OctoMap auf meinem Macbook zum laufen zu bringen, möchte ich die Schritte nicht für mich behalten. Schließlich sollte das Einstiegslevel für die Nutzung dieses genialen OpenSource Projekts von Armin Hornung, Kai Wurm, Maren Bennewitz und Co. so niedrig wie möglich gehalten werden.
Occupancy Grids – was ist das?
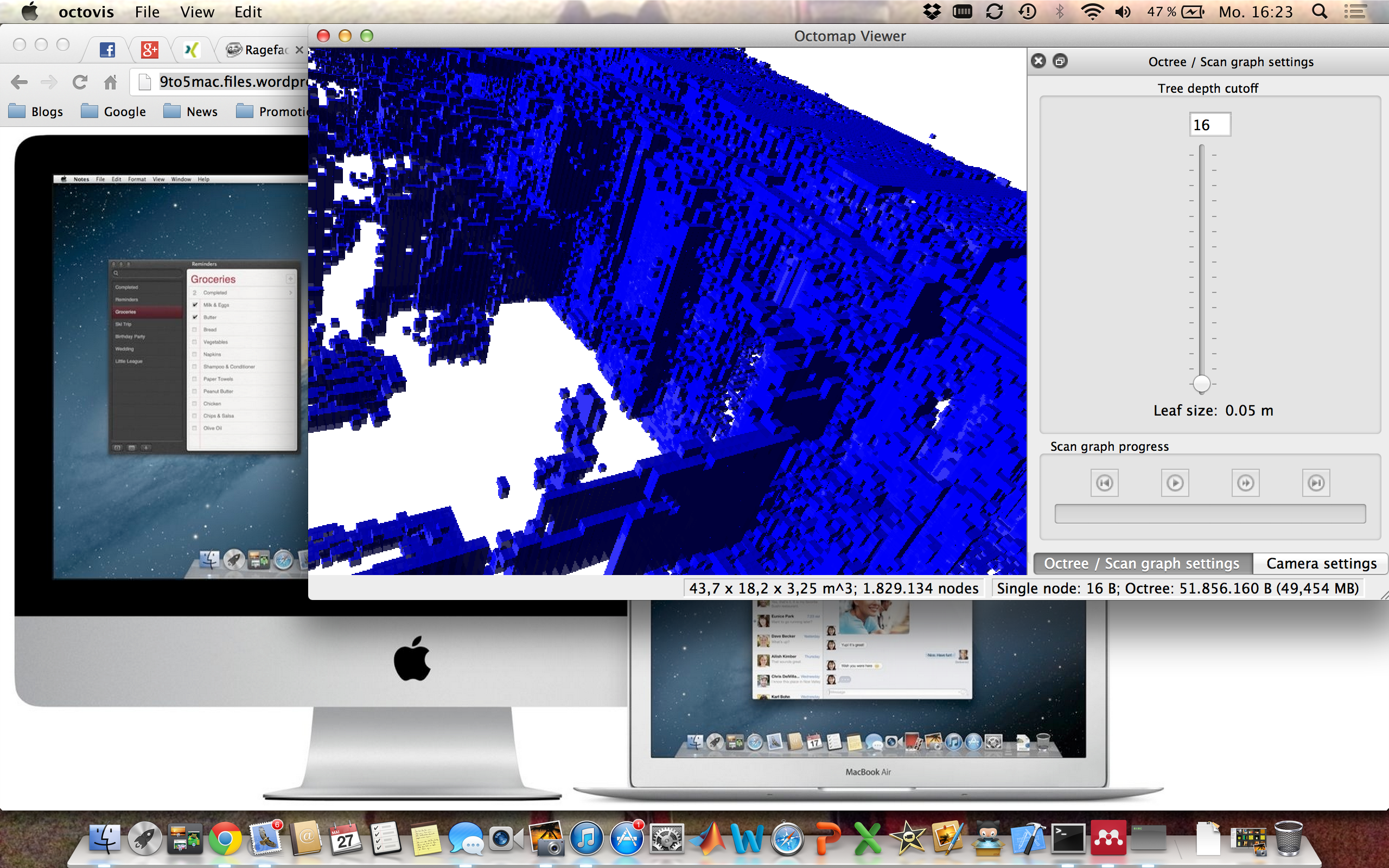
Als Ergebnis werden (live) Karten generiert, die eine bestimmte Wahrscheinlichkeit für jeden Punkt im Raum (3D oder auch 2D) dafür berechnen, ob sich dort ein Hindernis/Gegenstand befindet oder ob es frei ist (to occupy > belegen/besetzen). Umso feiner die Auflösung, umso besser kann das Objekt aufgelöst werden aber umso mehr Arbeitsspeicher wird dafür benötigt. In [Hornung, A., Wurm, K. M., Bennewitz, M., Stachniss, C., & Burgard, W. (2013). OctoMap: an efficient probabilistic 3D mapping framework based on octrees. Autonomous Robots, 34(3), 189–206. doi:10.1007/s10514-012-9321-0] wird eine gute Erklärung dazu gegeben.
Occupancy Grids – Wofür braucht man das?
Zum Beispiel damit Roboter ihre Umgebung wahrnehmen können.
Oder damit man 3D Umgebungen erzeugen kann.
Oder eben auch, um mit einem autonom fahrenden Fahrzeug nicht gegen Hindernisse zu steuern.