


Ein sehr simples Abstraktionsmodell um die Dynamik eines Fahrzeugs in vertikaler Richtung zu simulieren ist die Reduktion auf ein 1/4-Fahrzeug-Modell. Das heißt, dass das Fahrzeug in Längsrichtung geteilt wird (2 Räder + Nickbewegung) und dann nochmal in Querrichtung. Somit bleibt ein Rad mit entsprechender Federung und Stoßdämpfern, 1/4 der Fahrzeugmasse und 1/4 des Fahrers übrig.

Interessant ist nun die Fragestellung, welche Eigenfrequenzen das System hat und wie es auf Bodenwellen reagiert. Außerdem kann man die Auswirkung von defekten Stoßdämpfern auf die Schwingung berechnen.
Bewegungsgleichungen für ein Drei-Massen-Feder-Dämpfer-Modell
Diese sind wunderbar in [Mitschke – Dynamik der Kraftfahrzeuge] beschrieben. Diese Nomenklatur möchte ich gleich übernehmen.
Die Differentialgleichungen sollen nun numerisch “gelöst” werden. Dazu müssen diese in eine Form gebracht werden, welche einfach mit geeigneter Software berechnet werden kann. Prinzipiell ginge dies sogar mit Excel, allerdings wird es bei komplexeren Systemen zunehmend komplizierter. Daher soll auf den unangefochtenen Marktführer für mathematische Berechnungen, Mathworks Matlab zurück gegriffen werden.
3-Massen-Feder-Dämpfer Viertelfahrzeug im Zustandsraummodell
Die einfachste Möglichkeit ein System zu beschreiben ist in Form eines Zustandsraummodells. Dazu werden die Differentialgleichungen auf Differentialgleichungen 1. Ordnung reduziert. Mit der Nomenklatur von [Mitschke] ist der Zustand des 3-Massen-Feder-Dämpfer Viertelfahrzeugs mit folgendem Zustandsvektor \(\vec x\) vollständig beschrieben.
\[\vec x=\begin{bmatrix}z_1 \\ \dot z_1 \\ z_2 \\ \dot z_2 \\ z_3 \\ \dot z_3 \end{bmatrix}=\begin{bmatrix}\text{Vertikalbewegung des Rades} \\ \text{Vertikalgeschwindigkeit des Rades} \\ \text{Vertikalbewegung des Aufbaus} \\ \text{Vertikalgeschwindigkeit des Aufbaus} \\ \text{Vertikalbewegung des Fahrers} \\ \text{Vertikalgeschwindigkeit des Fahrers} \end{bmatrix}\]
Sind die Position und die Geschwindigkeit von Rad, Aufbau und Fahrer bekannt (6 Variablen), so ist das dynamische System vollständig beschrieben. Der Vektor x stellt den Zustand dar.
Ein Zustandsraummodell ist allgemein in der Form
\[\dot x=\boldsymbol{A} \cdot x + \boldsymbol{b} \cdot h\]
Dabei ist A die Systemmatrix in welcher die Dynamik beschrieben wird. Als b wird der Steuervektor bezeichnet, welcher beschreibt wie die Änderung von h (in diesem Fall die Unebenheit der Straße) auf das System wirkt.
Die Vorgehensweise zur Erstellung eines Zustandsraummodells aus Differentialgleichungen basiert auf Matrizenrechnung.
\[\begin{bmatrix}\dot z_1 \\ \ddot z_1 \\ \dot z_2 \\ \ddot z_2 \\ \dot z_3 \\ \ddot z_3 \end{bmatrix} = \begin{bmatrix}0 & 1 & 0 & 0 & 0 & 0 \\ -\frac{(c_2+c_1)}{m_1} & -\frac{k_2}{m_1} & \frac{c_2}{m_1} & \frac{k_2}{m_1} & 0 & 0 \\ 0 & 0 & 0 & 1 & 0 & 0 \\ \frac{c_2}{m_2} & \frac{k_2}{m_2} & -\frac{(c_3+c_2)}{m_2} & -\frac{(k_3+k_2)}{m_2} & -\frac{c_3}{m_2} & \frac{k_3}{m_2} \\ 0 & 0 & 0 & 0 & 0 & 1 \\ 0 & 0 & \frac{c_3}{m_3} & \frac{k_3}{m_3} & -\frac{c_3}{m_3} & -\frac{k_3}{m_3} \end{bmatrix} \cdot \begin{bmatrix} z_1 \\ \dot z_1 \\ z_2 \\ \dot z_2 \\ z_3 \\ \dot z_3 \end{bmatrix} + \begin{bmatrix}0 \\ \frac{c_1}{m_1} \\ 0 \\ 0 \\ 0 \\ 0 \end{bmatrix} \cdot h\]
Die für die Simulation nötigen Matrizen \(C\) (Beobachtungsvektor) und \(D\) (Durchgriffsvektor) sind:
\[\vec c=\begin{bmatrix}0 & 0 & 0 & 0 & 0 & 0\end{bmatrix}\]
\[d=\begin{bmatrix}0\end{bmatrix}\]
Je nachdem welche Spalte im Beobachtungsvektor mit 1 belegt wird, kann Bewegung oder Geschwindigkeit von Rad, Aufbau oder Fahrer “beobachtet” werden. Das System ist nun vollständig beschrieben und kann mit Matlab berechnet werden.
Numerische Berechnung mit Matlab
% check ob Toolbox installiert ist für Zustandsraummodell
if exist('ss')==2
disp('System Control Toolbox ist installiert')
else
disp('System Control Toolbox wird benötigt')
return
end
clc; clear all;
% Systemparameter
m1 = 20; %Radmasse /kg
m2 = 2000/4; %Aufbaumasse /kg
m3 = 80/4; %Fahrermasse /kg
c1 = 100000; %Federsteifigkeit Rad /N/m
c2 = 20000; %Federsteifigkeit Fahrwerk /N/m
c3 = 10000; %Federsteifigkeit Sitz /N/m
k2 = 1400; %Dämpfung Stoßdämpfer /Ns/m
k3 = 300; %Dämpfung Sitz /Ns/m
tend=2; %Simulationsdauer
%Systemmatrix
A = [ 0 1 0 0 0 0;
-(c2+c1)/m1 -k2/m1 c2/m1 k2/m1 0 0;
0 0 0 1 0 0;
c2/m2 k2/m2 -(c3+c2)/m2 -(k3+k2)/m2 c3/m2 k3/m2;
0 0 0 0 0 1;
0 0 c3/m3 k3/m3 -c3/m3 -k3/m3];
%Steuermatrix
B = [0 c1/m1 0 0 0 0]';
%Beobachtungsmatrix
C = [1 0 0 0 0 0]; % Radbewegung wird beobachtet
%Durchgriffsmatrix
D = [0];
%Zeitbasis
t=0:0.001:tend;
%Eigenfrequenzen
fRad =round(100*sqrt((c1+c2)/m1)/(2*pi))/100
fAufbau =round(100*sqrt(c2/m2)/(2*pi))/100
fFahrer =round(100*sqrt(c3/m3)/(2*pi))/100
% Straße
f=fRad; %Anregungsfrequenz
h=cos(f*t*2*pi)*0.2-0.2; %Sinusanregung
%h=[zeros(40,1); 0.2*ones(length(t)-40,1)]'; %Kante
%h=rand(1,length(t))*0.2; %stochastische Anregung
% Berechnung
system = ss(A,B,C,D); %Definition des Zustandsraummodells
[y,t,x]=lsim(system,h,t); %Simulation
Durch die Berechnung lsim wird nun die Trajektorie des Zustandsvektors für jeden diskreten Zeitschritt t berechnet. Die interessanten Größen sind die Auslenkungen von Rad, Aufbau und Fahrer. Diese sind im Zustandsvektor x in der 1., 3. und 5. Zeile abgelegt. Da der Beobachtungsvektor c=[1 0 0 0 0 0] definiert wurde, ist der Systemausgang y der Radhub.
Radhub = x(:,1);
Aufbauhub = x(:,3);
Fahrerhub = x(:,5);
plot(t, [h', Radhub, Aufbauhub, Fahrerhub]);
legend('Strasse','Rad','Aufbau','Fahrer');
xlabel('Zeit [s]');
ylabel('Vertikalbewegung [m]');
Simulationsergebnisse
Überfahren einer Bodenunebenheit
Anregung in kritischen Frequenzen
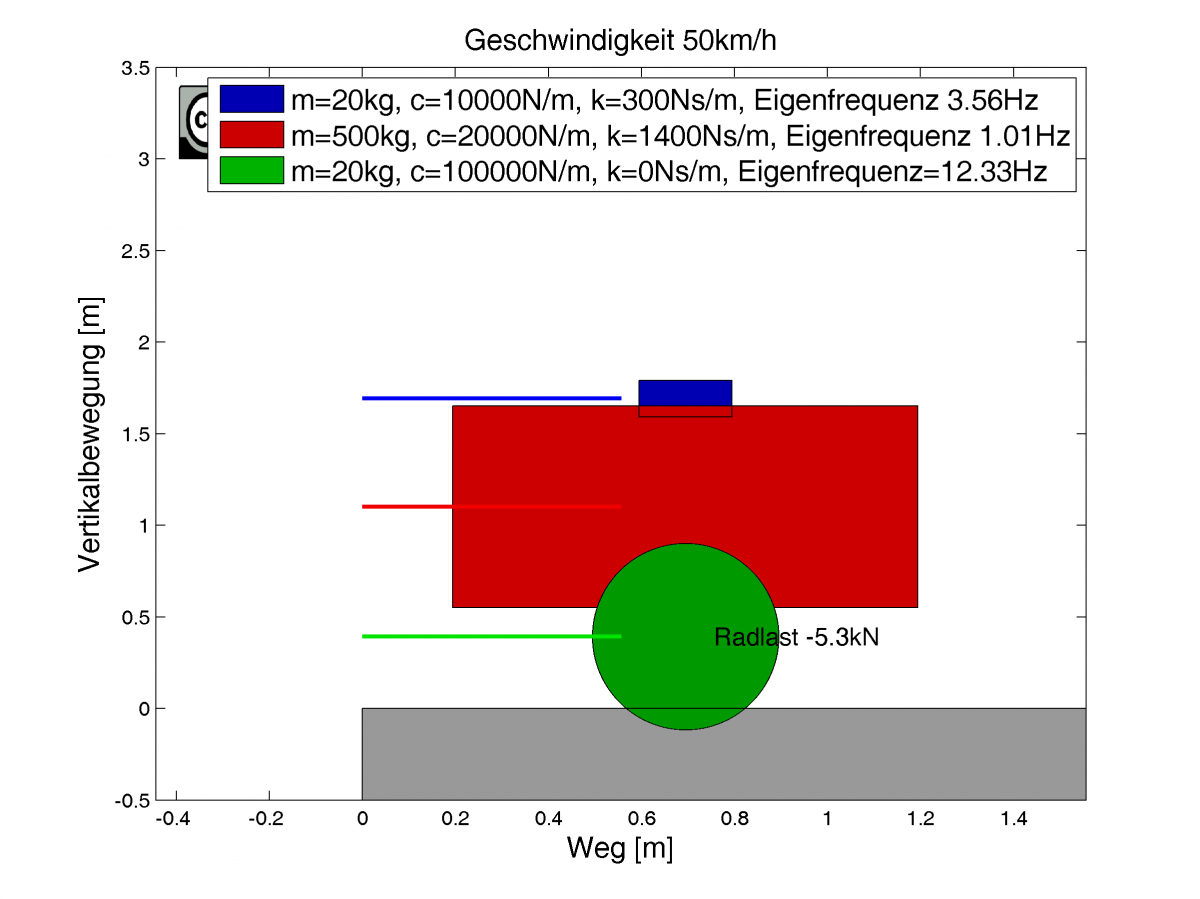
Interessant ist, dass berechnet werden kann, in welchem Bereich die Eigenfrequenzen von Aufbau, Rad oder Fahrer liegen. Diese sind für die gewählten Parameter bei ca. 1Hz (Aufbau), 3Hz (Fahrer) und 12Hz (Rad).
Die Berechnung ist natürlich so vereinfacht, dass keine geometrischen Beschränkungen (Rad ist vollständig Ein-/Ausgefedert oder Aufbau schlägt auf Straße auf) implementiert sind. Grundsätzlich ist die Animation einer fahrenden Bewegung auch nur zum besseren Verständnis erstellt worden.
Weitere Animationen
Zweimassenschwinger in Excel
Wer die Schwingung in Excel ansehen möchte, der kann sich auch folgende Excel Datei runterladen:
Download Excel Viertelfahrzeug SchwingungIn dieser wurde einfach die Differentialgleichung numerisch integriert.



8 Comments
Mir ist gerade aufgefallen, dass die Federsteifigkeit vom Rad, also c1 eine 10er Potenz zu hoch gewählt ist. Das ist ein viel zu hartes Rad! Vergleichbar mit einem Vollgummireifen.
Hallo,
die Radfedersteifigkeit haben Sie sicher aus dem Buch “Fahrzeugdynamik”? Aufgrund Ihres Hinweises habe ich noch mal recherchiert. Im Fahrwerkhandbuch werden 200 bis 350 N/mm angegeben, also scheint die Größenordnung doch zu stimmen.
Hallo Herr Balzer,
Ihr Webseite finde ich super. Gelegentlich lese ich die Beitraege. Bin Doktorand an der TU-Madrid und habe an der TUM studiert. Wolte eine Frage stellen. Ich habe eine excel Datei /zum ersten Mal eine Solche bekommen. Dort gibt es Rate x Rate y Rate z aus gyroscopic platform (Kreiselplattform auf de??) und soweit ich verstanden habe (in spanischer Sprache), sollte ich den Weg des Fahrzeugs mit einer einfachen Formel in excel berechnen lassen. Das Problem ist aber da, da ich die Werte mit rate x und y deg/sec und rate z deg habe und die mechanismus nicht mehr kenne, weiss ich nicht ob die delta x=v*delta t benutzen soll. Haben Sie etwas Ahnung davon?
Danke für die Antwort
Freundliche Grüsse
Hallo,
das hört sich an, als ob es auf eine numerische Integration mit Excel hinaus läuft: https://www.cbcity.de/numerische-integration-mit-excel
Meinen sie das?
Wenn sie von deg/sec auf deg kommen wollen und in Excel die Zeit auch steht, dann können sie das einfach numerisch integrieren. Zu beachten ist, dass es bei längerer Integrationsdauer zu einem Integrationsfehler kommt. Die Position, welche sie berechnen möchten, wird also nach ein paar Sekunden nicht mehr genau sein. Das hängt aber immer vom ganz spezifischen Messsystem und der Genauigkeit / Anforderung ab.
Guten Tag,
ich bin sehr von Ihrer Animation angetan und frage mich, wie man eine solche scrollende X-Achse animieren kann. Ist es möglich, dass Sie mir den Matlabcode zu dieser Animation zu Verfügung stellen?
Hallo, danke für das Lob!
Das ist ganz einfach. Einfach mit jedem Zeitschritt das xlim für die X-Achse weiter rücken.
t=0:0.005:6; v=50/3.6; %Fahrgeschwindigkeit s=[0]; for i=2:1:length(t) s(i)=v.*t(i); xlim([s(i)-2 s(i)+5]) endDa ich von der Animation ebenfalls sehr angetan bin würde ich gerne wissen, wie sich die Animation realisieren lässt und ob der Code dafür irgendwie zur Verfügung gestellt werden könnte! :)