



Drohnen in der Luft, die die unterbezahlten und bemitleidenswerten Paketzusteller ersetzen sollen? Ein paar Videoaufnahmen von gelben Octocoptern und die Botschaft, dass die Luftfahrtbehörde an einer Gesetzesänderung arbeitet: Fertig ist das Weihnachtsmarketing von Amazon. Große namenhafte Zeitungen springen auf und multiplizieren die Botschaft. Grandios, so muss ein CEO das machen.
Herr, lass Hirn regnen
Bevor man sich der schönen Vorstellung hin gibt, sollte man jedoch mal fragen, was nötig ist, damit eine Drohne autonom die Paketzustellung realisieren kann.
Zwei Konzepte sind denkbar: Vollautonomer Flug und Fernsteuerung durch einen Menschen.
Da könnte man zuerst mal schauen, was State of the Art in der autonomen Steuerung von Drohnen ist. Die ETH Zürich dürfte wohl mit an der Spitze der Entwicklung stehen, weshalb es sich lohnt, dort mal einen Blick auf die aktuellen Veröffentlichungen oderVideos zu werfen.
Start und Ziel
Das kleinste Problem bei der Drohnenlieferung ist Start und Zieladresse. Startadresse ist das Logistikzentrum, welches beispielsweise in Bad Hersfeld an der Autobahn liegt. Der 16km Flugradius muss ja für Hin- & Rückweg ausreichen, weshalb er auf effektiv 8km zusammen schmilzt. Damit dürfte man in dieser Region vielleicht ein paar hundert Menschen erreichen.
8km Flugzone um das Amazon Logistikzentrum in Bad-Hersfeld, Karte: Google Maps
Die Drohne unterwegs: Wo entlang fliegen?
Das größte Problem bei autonomen Vehikeln (UAV) ist eigentlich, dass sie ziemlich dumm sind. Sie können komplexe Situationen nicht einfach einschätzen und eine Lösung präsentieren. Ein Flug von A nach B ist aber eine extrem komplexe Situation. Als Beispiel könnte man die Mercedes S-Klasse mit ihrer autonomen Fahrt von auf den Spuren von Bertha Benz nutzen, um das Problem zu verdeutlichen:
Die Strecke wurde vorab extrem detailreich vermessen, jede Ampel war auf den Zentimeter genau kartiert, Häuserecken, Ampelmasten, Schilder, alles diente zur Eigenortung des Fahrzeugs, welches aber selbst noch mit einer Vielzahl an Sensoren ausgestattet war. Das Stichwort lautet hier “SLAM” (Syncronuous Location and Mapping). Ein autonom fahrendes Fahrzeug, welches im Falle eines PKW nur Zweidimensional (also in der Ebene) agieren muss, benötigt detaillierteste Informationen über die eigene Position.
GPS absolut nicht ausreichend
Die Positionsinformationen, welche durch Eigenortung über ein Globales Navigationssystem zu beziehen sind, reichen in ihrer Qualität überhaupt nicht aus, um eine autonome Navigation in einer Stadt (wo die Menschen ja wohnen) zu realisieren.
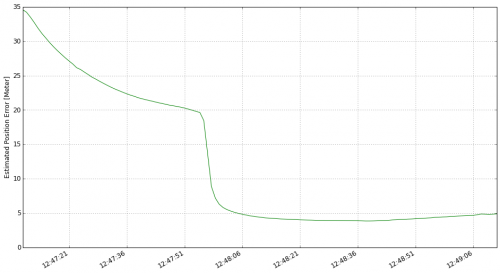
Geschätzter Positionsfehler eines MTK MT3339 (PA6H module) GPS Moduls während einer Positionsmessung zwischen 2 Häusern
In den Videos der ETH Zürich sind aus diesem Grund auch immer Infrarotkameras zu sehen, die die weißen Punkte an der Drohne tracken. Somit ist Ort und Lage jederzeit bekannt und die Drohne kann ihre Position regeln. Wie schwer es trotzdem ist, zeigt dieses Video der ETH Zürich:
Umfeld entweder bekannt und statisch oder es sind Sensoren nötig
Hätte man das Problem gelöst, dass man exakt weiß, wo man sich befindet (wobei GPS nicht als exakt zu werten ist), hat man noch das Problem, dass man nicht allein in einer statischen Umgebung unterwegs ist. Selbst wenn Amazon Jahre investiert und eine 3D-Kartierung des gesamten Liefergebiets vornimmt, es ist nicht statisch. Die Welt ändert sich. Baustellen entstehen, Gerüste an Häuser, Fahnenmasten, Freileitungen, Bäume, Sommer/Winter, Hochhäuser, Baukräne, schließlich muss man irgendwo landen, man muss auf den Boden finden.
Eine Kartierung und anschließende fixe Navigation von Start zu Ziel (Offline) ist für diesen Anwendungszweck absolut keine Möglichkeit.
Read More: Autonomous Exploration in Unknown Urban Environments for Unmanned Aerial Vehicles
Die Drohne benötigt Sensoren, die benötigen Strom
Für den tatsächlichen Einsatz benötigt eine Drohne Sensoren. Eine Menge Sensoren. Für die detailreiche Erkennung von Hindernissen ist mindestens ein Laserscanner nötig. Die Verarbeitung der Daten muss in Echtzeit auf der Drohne geschehen. Eventuell ist sogar Videosensorik notwendig um Hindernisse zweifelsfrei zu erkennen. Datenschützer wären die ersten, die mit dem Luftgewehr am Straßenrand stehen würden.
Die Verarbeitung der Umfeldsensordaten, die Pfadplanung um die Hindernisse herum, sowie die Regelung der Drohne benötigt allein mehr Energie, als derzeit mobil in diesem Maßstab in der Luft sein kann. In aktuellen Veröffentlichungen zur Pfadplanung ist von Intel Core i7-870 Prozessoren die Rede, welche die Pfadplanung in Echtzeit übernehmen können. Das muss mit in die Luft! Die 8km Reichweite schmilzt zusammen auf ein nicht mehr nutzbares Einzugsgebiet.
Selbst wenn alle technischen Probleme gelöst wären, gäbe es immer noch das Problem der Haftung. An dieser Stelle tritt die Automobilindustrie schon seit Jahren und es ist auf juristischer Ebene noch keine Lösung gefunden.
Einzige Möglichkeit: Ferngesteuerte Drohne
Es gäbe noch die Variante, dass die Drohne von einem Menschen “teleoperiert” wird, wie man so schön sagt. Dabei muss das Live-Videobild aber in Echtzeit zum Steuerungsrechner übertragen werden, die vom Menschen erzeugten Steuerbefehle wieder zurück an die Drohne.
Dabei kann man davon ausgehen, dass die Video- und Datenübertragung nicht wie beim US-Militär über Satelliten geschehen wird, sondern über das normale Mobilfunknetz. An dieser Stelle darf man nicht den Fehler machen und laut rufen “Die AR.Drone kann ich auch über WLAN steuern!”. Die Funkverbindung besteht in dem Fall direkt zwischen AR.Drone und Smartphone, die Latenz ist relativ gering.
Bei der Übertragung über Mobilfunk und Internet, jeweils hin und zurück, ist mit erheblicher Latenz zu rechnen. Von der realisierbaren Datenqualität mal ganz abgesehen. Ich selbst habe von 2010 bis 2012 in einem Projekt zur Echtzeitsteuerung über das Internet gearbeitet und auch wir konnten die nötige Latenz nicht garantieren. Wenn ein YouTube Video mal stockt ist das ärgerlich, wenn eine Drohne keine Steuerbefehle bekommt, wird es gefährlich.
Read More: Real-Time Video Relay for UAV Traffic Surveillance Systems Through Available Communication Networks
Das Schlimmste Szenario für eine Regelung ist die Totzeit, die sich auch einer verzögerten Übertragung ergibt. Ist diese noch dynamisch, kann kaum ein Flug garantiert werden.
Als einfaches Experiment zu Haus kann man sich mal einen Besenstiel auf den Finger stellen und diesen aufrecht Balancieren. Der Besenstiel ist die Drohne, die geflogen werden soll. Nun fliegt diese Drohne in ein Funkloch, beispielsweise Abschattung durch ein Gebäude oder eben einfach nur Edge statt 3G oder LTE. Um das zu Haus zu simulieren, einfach die Augen von jemandem zuhalten lassen und abwarten, was mit dem Besenstiel passiert.
Read More: Optimal control of LTI systems over unreliable communication links
Fazit: 99% Marketing, 1% Innovation
Das 1% Innovation rechne ich, weil die Äußerungen des Amazon CEO dazu geführt hat, dass du jetzt diesen Artikel gelesen hast und vielleicht eine gute Idee hast, wie man die angesprochenen Probleme lösen könnte! Denn das es eine gute Idee ist, bestreitet niemand. Aber der Dönercopter war zuerst da.
Das Titelbild basiert auf “Octocopter” von FaceMePLS via http://www.flickr.com/photos/faceme/7939543004/
2 Comments