


Motorblog
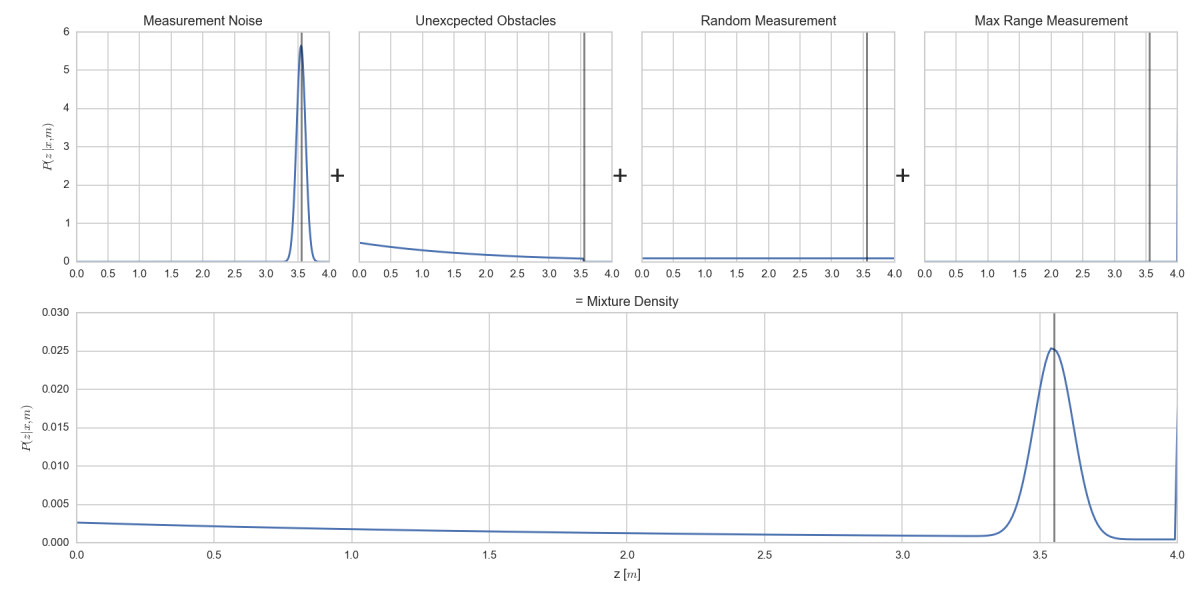
Im ersten Teil der Robotik-Sensor Reihe, wurde ein Look-Up Table für den Tinkerforge Ultraschall Sensor parametriert. Nun ist es möglich reale Entfernungen von diesem Sensor zu erhalten. Der Beitrag schloss mit den Worten, dass eine Normalverteilung für Sensorwerte nur im Bereich 1…2m anzunehmen ist. Etwas fortgeschrittene Filterverfahren, wie das Kalman Filter, arbeiten unter der Annahme, dass die Sensoren ein AWGN (Additive White Gaussian Noise) Signal ausgeben. Dies bedeutet, dass der Sensor den wahren Wert zwar messen kann, aber durch zahlreiche Fehlereinflüsse zusätzlich weißes Rauschen aufaddiert mit ausgegeben wird.
Wie nun also den ‘Wahren Wert’ erhalten?
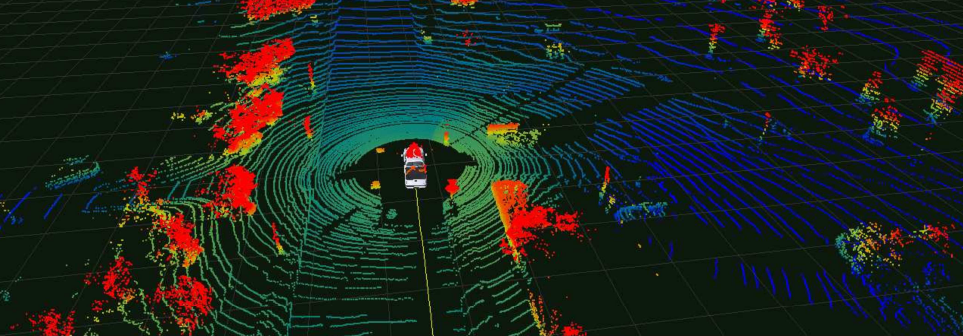
Am gestrigen 07.05.2012 hat Google für Nevada, U.S.A. die Lizenz erhalten, welche die automobile Welt verändern könnte. Google darf die Testflotte, bestehend aus sechs Toyota Prius, einem Audi TT und einem Lexus RX450h auf öffentlichen Straßen fahren lassen. Der Gag an der Sache ist, dass die Fahrzeuge vollständig autonom fahren können. Von der Wegplanung über die Umfeldwahrnehmung, Kollisionsvermeidung, Spurwechsel, Abbiegemanöver als auch Ein-/Ausparken ist alles implementiert, was ein Fahrzeug können muss.

Umfeldwahrnehmung durch einen 3D Laserscanner | Quelle: Pandey, McBride - Extrinsic calibration of a 3d laser scanner and an omnidirectional camera, http://dx.doi.org/10.3182/20100906-3-IT-2019.00059
Der leitende Forscher bei Google ist der deutsche, ehemalige Stanford Professor Sebastian Thrun, welcher einräumt, dass die Fehlerquote der Fahrzeuge derzeit noch zu hoch sei. Im Schnitt alle paar 1000km müsse der speziell geschulte Testfahrer, welcher immer an Board ist, eingreifen. Dies sei zwar besser als ein betrunkener Fahrer, allerdings noch wesentlich schlechter als ein aufgeweckter normaler Durchschnittsfahrer, so Thrun. Und genau das ist der Grund, weshalb es jetzt an den Flottentest geht. Die Algorithmen können nur besser werden, wenn daran geforscht, gearbeitet und Fehler gemacht werden. Es gilt Millionen von Testkilometern zu absolvieren, damit die Fehlerquote auf niedrige ppm sinkt und eine signifikante Verbesserung gegenüber dem humanen Fahrer erreicht werden kann.

Ich bin als Fahrzeugingenieur natürlich hellhörig geworden, als Sebastian Thrun auf der DLD 2012 ein paar Eindrücke seines Pilotprojekts AI-Class zum besten gab. Bewegende Aussagen über seine Erfahrungen vom Kurs. Schlussendlich sagte er, dass er die Professur an der Stanford University ruhen lassen möchte um sich seinem Herzenswunsch zu widmen. Der kostenlosen, freien Onlineuniversität udacity.com, welche sogleich mit dem Kurs “Programming a robotic car” am 20.02.2012 startete.

Da ich mich beruflich ohnehin mit dem Thema beschäftige, war das eine absolut selbstverständliche Sache, den Kurs zu besuchen. Ich möchte ein paar Eindrücke über die mögliche Zukunft der Hochschulbildung, des E-Learning, schildern.