


Motorblog


Google präsentierte dieser Tage mal wieder einen interessanten Einblick in die Entwicklungsarbeit der vollautonomen Fahrzeuge. Im Vergleich mit dem autonomen Navigieren in der Stadt ist das Fahren in der Wüste ein vergleichsweise einfaches Unterfangen.
Das Video zeigt eindrucksvoll, welche Sonderfälle vom Auto erkannt und korrekt behandelt werden müssen.
Anders als ein iPod oder das WLAN Radio, darf ein Auto niemals abstürzen. Eine algorithmische Fehlentscheidung führt oft zu Sach- oder Personenschaden, was der Maschine nicht verziehen wird. Menschen fahren auch nicht perfekt, aber daran hat man sich gewöhnt.
Der erste große Rechtsstreit über die Haftungsfrage lässt mit Sicherheit nicht mehr lang auf sich warten…
Titelbild: Steve Jurvetson

Am gestrigen 07.05.2012 hat Google für Nevada, U.S.A. die Lizenz erhalten, welche die automobile Welt verändern könnte. Google darf die Testflotte, bestehend aus sechs Toyota Prius, einem Audi TT und einem Lexus RX450h auf öffentlichen Straßen fahren lassen. Der Gag an der Sache ist, dass die Fahrzeuge vollständig autonom fahren können. Von der Wegplanung über die Umfeldwahrnehmung, Kollisionsvermeidung, Spurwechsel, Abbiegemanöver als auch Ein-/Ausparken ist alles implementiert, was ein Fahrzeug können muss.

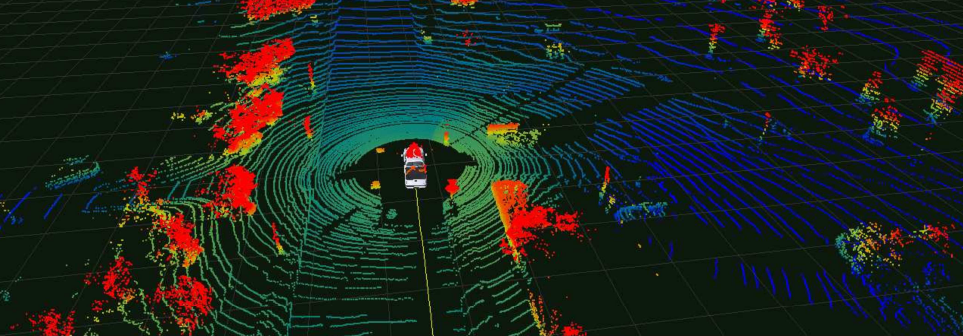
Umfeldwahrnehmung durch einen 3D Laserscanner | Quelle: Pandey, McBride - Extrinsic calibration of a 3d laser scanner and an omnidirectional camera, http://dx.doi.org/10.3182/20100906-3-IT-2019.00059
Der leitende Forscher bei Google ist der deutsche, ehemalige Stanford Professor Sebastian Thrun, welcher einräumt, dass die Fehlerquote der Fahrzeuge derzeit noch zu hoch sei. Im Schnitt alle paar 1000km müsse der speziell geschulte Testfahrer, welcher immer an Board ist, eingreifen. Dies sei zwar besser als ein betrunkener Fahrer, allerdings noch wesentlich schlechter als ein aufgeweckter normaler Durchschnittsfahrer, so Thrun. Und genau das ist der Grund, weshalb es jetzt an den Flottentest geht. Die Algorithmen können nur besser werden, wenn daran geforscht, gearbeitet und Fehler gemacht werden. Es gilt Millionen von Testkilometern zu absolvieren, damit die Fehlerquote auf niedrige ppm sinkt und eine signifikante Verbesserung gegenüber dem humanen Fahrer erreicht werden kann.